
Infrared Solutions, Inc., una compañía de Fluke, ha desarrollado una nueva tecnología infrarroja llamada IR-Fusion™ que combina, pixel por pixel, las imágenes visibles e infrarrojas en una sola pantalla. Este artículo describe el novedoso enfoque con patente en trámite y de bajo costo, destinado a solventar el problema de paralaje que se produce al combinar las imágenes que se obtienen de dos ópticas diferentes: la visible y la de infrarrojos.
Antecedentes
Hay muchas razones por las que las imágenes visibles generalmente son más definidas y claras que las imágenes infrarrojas. Una es que los conjuntos de sensores visibles pueden formarse con elementos detectores más pequeños y con un número de elementos mucho mayor. Otra es que, dado que las imágenes visibles no se utilizan para medir la temperatura, se pueden generar únicamente con radiación reflejada, lo cual produce generalmente imágenes más definidas que la radiación emitida.
Los conjuntos de detectores visibles tienen millones de elementos, mientras que los infrarrojos tienen menos. La FlexCam de Fluke tiene un conjunto visible de 1 360 000 elementos detectores y un conjunto de infrarrojos con 1/18 de esa cifra (76 800 elementos). Como resultado, las imágenes visibles pueden tener muchos más detalles que las imágenes infrarrojas. Además, las imágenes visibles se pueden mostrar con los mismos colores, sombras e intensidades como las percibe el ojo humano, por lo que su estructura y carácter se interpretan más fácilmente que las imágenes infrarrojas.
Aunque las cámaras infrarrojas y visibles pueden registrar radiación que se emite y refleja desde un objetivo, las imágenes visibles casi siempre se producen a partir de la luz reflejada visible. En contraste, las imágenes infrarrojas que se emplean para medir la temperatura, deben registrar la radiación infrarroja emitida. La radiación reflejada visible puede producir un contraste nítido con límites definidos y diferencias de intensidad; por ejemplo, puede mostrar una fina línea blanca junto a otra fina línea negra.
También es posible obtener un contraste nítido de reflejo infrarrojo si se tiene una superficie de emisividad baja (alta reflectancia infrarroja) junto a una superficie de alta emisividad (baja reflectancia infrarroja). Sin embargo, es inusual tener superficies con diferencias nítidas de temperatura una junto a la otra. La transferencia de calor entre objetos cercanos puede restarle nitidez a las diferencias de temperatura mediante la producción de gradientes de temperatura, lo que dificulta la producción de imágenes de radiación emitida con bordes nítidos. Esta es otra razón por la que las imágenes infrarrojas que se utilizan para medir temperaturas generalmente son menos nítidas en comparación con las imágenes visibles.
La industria necesitaba una cámara que pudiera capturar una imagen que mostrara a detalle una imagen visible y la medida de temperatura de una imagen infrarroja. La mayoría de los operadores tomaban imágenes duplicadas, una con luz visible y otra infrarroja; sin embargo, correlacionar las imágenes a veces no era confiable. Lo realmente necesario era que ambas imágenes se superpusieran automáticamente una sobre otra.
Una propuesta fue combinar una cámara visible e infrarroja en un solo instrumento de modo que ambas imágenes se tomaran de manera simultánea; sin embargo, la correlación espacial sufría de paralaje. Funcionaba bien a largas distancias en las que el paralaje se puede pasar por alto. En cambio, para aplicaciones como el mantenimiento predictivo y ciencias de la construcción en las que la cámara se utiliza a distancias moderadas o cortas, el paralaje es un problema.
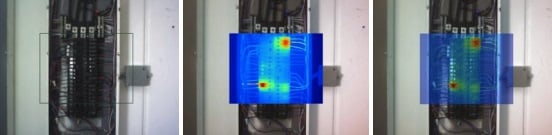
Solo infrarroja solo visible Mezcla 50/50

Imágenes mezcladas visibles e infrarrojas
La tecnología IR-Fusion combina en un solo instrumento una cámara con rango de video infrarrojo con una cámara con rango de video de luz visible, a fin de que la escena se pueda visualizar y grabar tanto en radiación visible como infrarroja. La imagen visible se registra automáticamente (corregida por paralaje) y se ajusta el tamaño para adecuarse a la imagen infrarroja, de tal forma que la escena infrarroja y la visible se puedan superponer una sobre la otra en la pantalla de la cámara. El operador puede elegir entre ver solo la imagen visible, la imagen infrarroja o la combinación mezclada (fusionada) de ambas. Vea las imágenes ilustrativas en la figura 1.
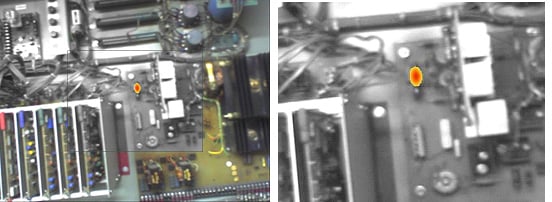
Dado que la cámara combina pixel por pixel las imágenes infrarrojas y visibles, el operador puede identificar fácilmente la ubicación de los puntos de interés infrarrojos del objetivo tomando en cuenta dónde se encuentran las características en la imagen mezclada. Una vez que la imagen infrarroja está enfocada, el operador de la máquina puede elegir entre ver solo la imagen con luz visible y leer las temperaturas infrarrojas en la imagen visible desde los datos que no se muestran pero que se asocian con la imagen infrarroja correspondiente. Un ejemplo de esto se puede ver en el panel solo visible de la figura 1, la cual muestra el punto más caliente a 121.7 °F.
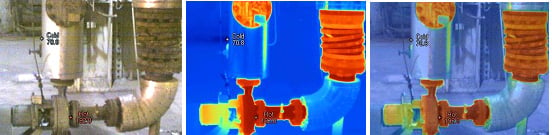
Con la imagen mezclada, la ubicación de una característica infrarroja de interés se puede identificar con precisión aun si el contraste infrarrojo es bajo y hay muy poca estructura en la imagen infrarroja. En la figura 2, la ubicación exacta de un punto mal aislado en una pared plana o un techo se ayuda mediante la visualización de una pequeña mancha o marca visible en la imagen visible/infrarroja.
Modos de visualización
Las cámaras infrarrojas Fluke Ti4X y 5X con IR-Fusion™ pueden funcionar en cinco modos de visualización: 1) Imagen en imagen, 2) Pantalla completa, 3) Alarmas de color, 4) Mezcla alfa y 5) Luz completamente visible. En cualquiera de los cuatro primeros modos, las temperaturas se graban y se pueden mostrar en la porción infrarroja de la imagen.
Combinado

Solo visible Solo infrarrojo Mezcla moderada
75 % Mezcla IR 50 % Mezcla IR 25 % Mezcla IR

Solo visible Solo infrarrojo Mezcla 50/50
1) Modo Imagen en imagen: en este modo, el cuadrante central de la pantalla solo es infrarrojo, solo visible o una mezcla de ambas. Los tres cuadrantes restantes de la pantalla están en solo visible. En este modo, la imagen infrarroja siempre se muestra en una posición fija en el centro de la pantalla.
La figura 4 muestra una imagen mezclada con diferentes porcentajes de mezcla de infrarrojo.
2) Modo Pantalla completa: en este modo, el cuadrante central del modo Imagen en imagen llena la pantalla. Al igual que en el modo Imagen en imagen, la pantalla completa puede configurarse en “solo visible”, “solo infrarroja” o mezcla de ambas. La figura 5 muestra una imagen en pantalla completa de la misma escena infrarroja que se muestra en la figura 4.
3) Modo Alarma de color: este modo se emplea para resaltar las áreas de interés que cumplen con criterios de temperatura específicos que establece el operador de la cámara. Se dispone de tres configuraciones: a) umbral caliente, b) umbral frío y c) rango absoluto.
a) En el modo de umbral caliente, cualquier pixel en la imagen con una temperatura superior a un ajuste de temperatura aparecerá en colores infrarrojos.
b) En el modo de umbral frío, cualquier pixel en la imagen con una temperatura inferior a un ajuste de temperatura aparecerá en colores infrarrojos.
c). En el modo de Rango absoluto (isoterma), el operador de la cámara especifica la temperatura más alta y la más baja de un rango. Cualquier pixel con una temperatura incluida dentro de este rango aparecerá en colores infrarrojos. En todos los modos de Alarma de color, los colores se establecen mediante una selección de paleta de infrarrojos y la intensidad por medio del grado de mezcla de infrarrojos. La visualización del modo se puede establecer ya sea como Imagen en imagen o Pantalla completa.
Cómo se logra la combinación
La tecnología IR-Fusion™ coloca el motor de una cámara visible en tiempo real en el alojamiento de una cámara infrarroja en tiempo real. La colocación es tal que el eje óptico visible es tan cercano al eje óptico infrarrojo como práctico y está casi paralelo al eje infrarrojo en el plano vertical. A fin de corregir el paralaje para un rango de distancias de objetivo, el campo de visión (FOV) de una de las cámaras debe ser más grande que el de la otra. Se optó por un FOV visible más grande dado que la óptica visible es actualmente menos costosa que la óptica infrarroja y las cámaras visibles tienen una resolución más fina. Por lo tanto, perder un poco de la imagen visible mediante el proceso de corrección del paralaje tiene menos impacto en la cámara y en las imágenes combinadas.
El diagrama 1 muestra el camino óptico y la configuración del sensor de la cámara infrarroja y visible combinadas. Hay dos caminos ópticos distintos y dos sensores independientes: uno para el visible y otro para el infrarrojo. Dado que los caminos ópticos para los sensores son diferentes, cada sensor "verá" la escena objetivo desde vistas ligeramente distintas provocando paralajes. Este error de paralaje se corrige de manera electrónica en la imagen combinada con los ajustes de software.
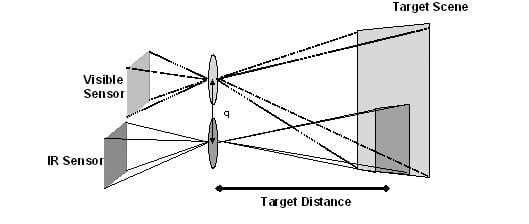
La óptica visible es tal que permanece enfocada en todas las distancias en que puede usarse. La lente infrarroja tiene un número f bajo y, como resultado, una profundidad de campo menor, lo que brinda un medio excelente para determinar la distancia hacia el objetivo. Solo la lente infrarroja necesita ajuste de enfoque para objetivos a distintas distancias.
Corrección de paralaje
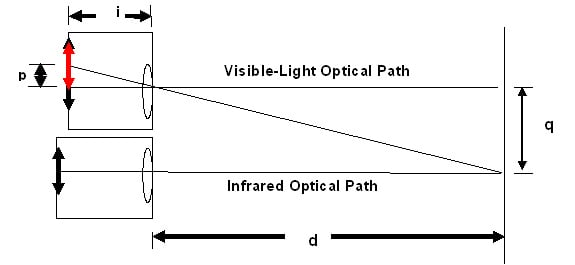
La corrección de paralaje se basa en la distancia de enfoque infrarrojo. El diagrama 2 muestra de manera geométrica la determinación de la ecuación de paralaje.
A partir de la ecuación de la lente estándar
- Donde: d = distancia al objeto
i = distancia a la imagen
f =longitud focal efectiva de la lente
Y del diagrama 2:
Donde: q = distancia de separación entre los ejes ópticos visible e infrarrojo p = compensación de imagen en el plano focal visible
Para una determinada cámara, la distancia de separación q y la longitud focal de la lente f son fijas. Por lo tanto, a partir de la ecuación anterior, la compensación de imagen visible es una función exclusiva de la distancia del objetivo. q d Camino óptico infrarrojo p i d Camino óptico de luz visible
Cuando se captura una imagen, la imagen totalmente visible y la imagen totalmente infrarroja, con todos los datos adicionales, se guardan en un archivo de imagen en la tarjeta de memoria de la cámara. Como parte de la imagen visible, se guarda la parte no mostrada de la imagen visible que se encuentra fuera de las dimensiones de la pantalla cuando se tomó la imagen. Posteriormente, si se requiere el ajuste posterior al procesamiento en el registro entre la imagen infrarroja y la visible en una computadora, la imagen visible completa está disponible para realizar tales ajustes.
Conclusión
Un enfoque novedoso para resolver el problema del paralaje de una cámara con óptica visible e infrarroja da como resultado una cámara comercial que mejora significativamente el desempeño y la utilidad para el mantenimiento predictivo y las aplicaciones en ciencias de la construcción. De manera específica, ofrece detalle espacial ampliamente mejorado para imágenes infrarrojas y contribuye en la identificación de la ubicación exacta de los puntos infrarrojos de interés.
Agradecimientos
El autor Roger Schmidt, desea agradecer el trabajo excepcional del equipo de ingeniería de Infrared Solutions, Inc., al inventar y desarrollar esta cámara única. El equipo estuvo dirigido por Kirk Johnson y Tom McManus y contó con el apoyo de Peter Bergstrom, Brian Bernald, Pierre Chaput, Lee Kantor, Mike Loukusa, Corey Packard, Tim Preble, Eugene Skobov, Justin Sheard, Ed Thiede y Mike Thorson. Asimismo, el autor desea agradecer el trabajo de Tony Tallman para el software de computadora, el cual facilitó brindar estas reveladoras imágenes en el papel.